Humans are definitely not too small to make an impact. Look at mosquitoes. Construction sites are hotbeds of mosquitoes. The problem of mosquitoes is worse in a condensed city like Hong Kong, where construction sites are inches away from other buildings. Unfortunately, authorities still rely largely on bare-eye observation and traditional pest control techniques, like regular spraying and installing zappers.
This paper proposes the use of an inspection robot for data collection, and subsequent data analysis. The process can solve existing mosquito problems and facilitate pre-emptive pest control measures in the future. Learning from the Australian experience, the robot can also kill mosquitoes with laser heat.
Balancing cost considerations, it is believed that this proposal can resolve the problem of the current remedial approach. This proposal can be first implemented in government projects. If effective, it can be expanded to other projects in Hong Kong.
Current Problem
The Food and Environmental Hygiene Department (“FEHD”) has introduced the Dengue Vector Surveillance Programme since 2003. Under the programme, some 3,440 gravitraps, which are black plastic containers with glue board attached, were placed around Hong Kong.Periodically, the gravitraps will be examined by laboratories to identify the presence of aedes albopictus, which is the vector of dengue fever. A monthly gravidtrap index and density index will be derived accordingly.When these indexes reach the alert threshold, FEHD activates its response mechanism and conducts anti-mosquito works. These works are carried out in the form of either environmental management (e.g., removal of stagnant water, discard water-holding containers, etc.) and chemical or biological agents (e.g., larvicide).
However, the existing mechanisms are not without limitations. There has been public criticisms regarding the gravidtrap for producing inaccurate results. Besides, the time lag in the release of surveillance indices and the ineffective utilisation of complaint data lead to an incomprehensive picture of mosquito presence in the city.
In the following, we will explain how our proposed solution could address these limitations through high-tech data collection, effective data transmission, and comprehensive data analysis.
Proposed Solution
Prototype

We propose using a robot to monitor and eliminate mosquitoes (“Anti-Mozzie Automators (AMA)”).
AMA is ball-shaped with four retractable legs, enabling it to move to different floors through staircase to detect the mosquito hot spots.
AMA is equipped with night-vision lens and recording technology, allowing it to transmit and analyse the surrounding to the FEHD team in real time.
The primary task of the robot is to collect and analyse mosquito-related data, as it’s unreliable to rely completely on the human eye regarding data collection. AMAs can save FEHD manpower resource, as they can patrol on autopilot.
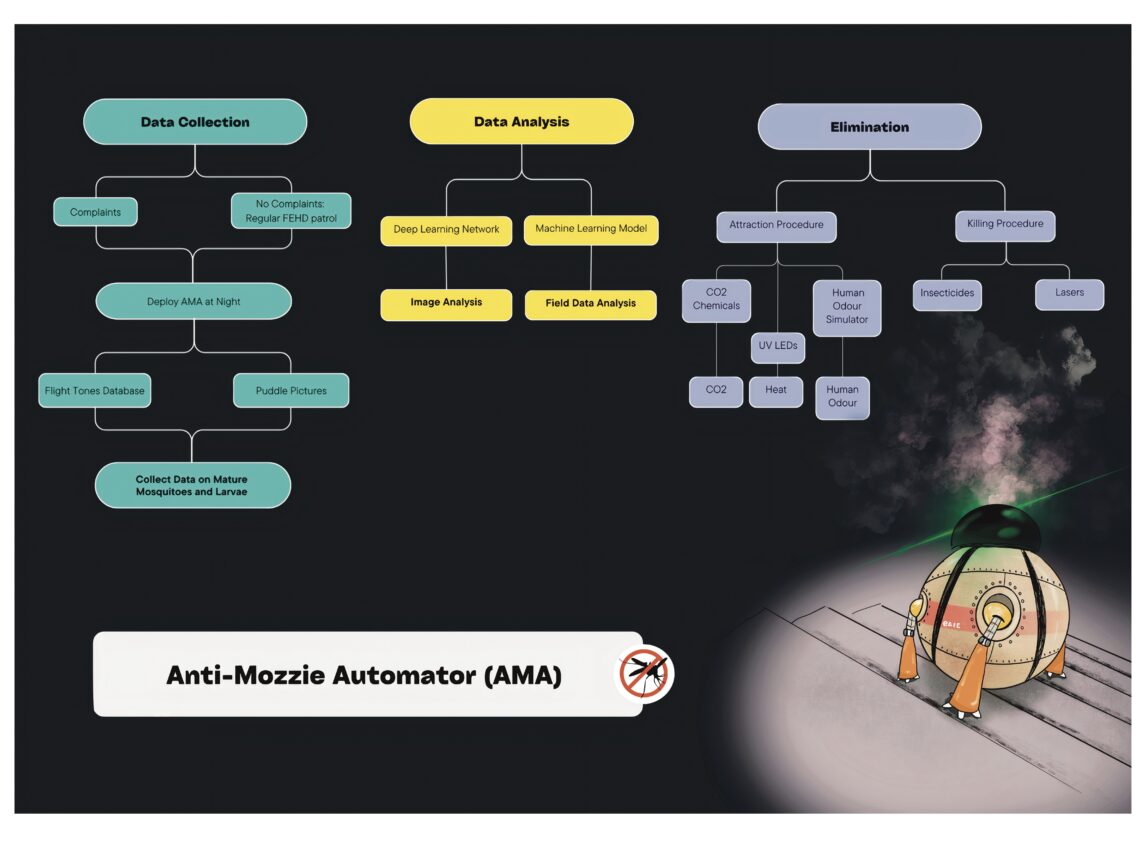
Data Collection
The first step is data collection.
First, FEHD commences investigation with AMAs in two ways. Once FEHD receives complaints (e.g. nearby residents), it deploys a AMA at 17:30 (when construction site workers get off work) and collects it at 06:00. This avoids causing accidents and disrupting construction site business when AMAs are roaming. Alternatively, if there is no existing data of the site or complaints, FEHD will deploy the AMA in the site at night to roam and detect mosquitoes’ existence.
Second, AMAs collect data of mature mosquitoes and larvae. Existing projects (e.g. HumBug, Abuzz) enables the detection of “flight tones” (sounds produced by mosquitoes flapping their wings)produced by different species and gender of adult mosquitoes.This is more effective than gravidtrapor other newly-proposed solutions (differentiating from Semwal et al.’s Dragonfly AMA. Dragonfly uses AI and machine learning, but they need to capture an actual mosquito to identify its species), as FEHD won’t need to capture the mosquito for the analysis. FEHD can use the existing database of flight tone. Moreover, as larvae are dependent on water, AMAs can detect puddles using its photo stock of puddles. Then they take and upload pictures of all puddles to the cloud for analysing larvae’s existence.
FEHD won’t need to capture the mosquito for the analysis. FEHD can use the existing database of flight tone. Moreover, as larvae are dependent on water, AMAs can detect puddles using its photo stock of puddles. Then they take and upload pictures of all puddles to the cloud for analysing larvae’s existence.
Data Analysis
The second step is data analysis.
First, images of mosquitoes taken by AMAs are analysed by deep learning networks to enhance the automated surveillance system.With more images and flight tone collected, AMAs can learn to more precisely identify mosquito presence, potentially with their species and gender. This further addresses the human inadequacies in traditional manual inspection.
Second, complaints and field data captured by AMAs are processed by machine learning models to identify specific environmental factors contributing to mosquito breeding in construction sites.An algorithm can be developed to predict mosquito hotspots, and suggest appropriate control measures. Continuous data collection at different sites allows the algorithm to recurrently learn from experiences, and enhance its accuracy and efficiency in predictions over time.
Mosquitoes Elimination
Mosquitoes detected are eliminated in a two-step approach, (1) attraction and (2) killing.
First, mosquitoes are to be attracted by AMAs with heat, carbon dioxide and human odour. These are the signals mosquitoes use to detect humans.Equipping AMAs with UV LEDs, carbon dioxide-generating chemicals, and devices spreading simulated human odour,mosquitoes may be lured to spaces near AMAs (read more here).
Second, mosquitoes are to be killed in two ways, either by spraying insecticides or shooting lasers. While a large number of mosquitoes may be killed in one go with insecticides, it is acknowledged that most insecticides are highly toxic, and milder products are only effective towards mosquitoes of certain species or growth stage.As a supplement, lethal lasers may be deployed to kill the mosquitoes by overheating them.

Practical Considerations
First, cost is a crucial consideration. As we develop the robots on a small scale as a pioneer scheme, the research and development cost might be high. The current market price of an indoor, LED, mosquito-eliminating robot is around HKD 4000.Our robot goes beyond LED and motion sensors, which includes moveable legs, data collection system and laser heating. This will add up to the total cost of development.
Second, public-private cooperation is needed in developing the technology. As we employ the technology in government projects and assist FEHD in data collection, the government is highly involved. We need to connect with industry suppliers to develop the necessary technology for the robot. Private industry can transform innovative ideas for real life application.
Third, security issues. From the perspective of data security, one would have to grant access to the robot moving freely around the construction site. We might need to input the site’s floor plan and specifications to the robot for accuracy. One has to beware of any leakage of sensitive data. On the other hand, we also consider the safety of the robots. Not only is it government property, it is also costly. Measures should be put in place to prevent someone from damaging the robots. We should also consider measures to limit the risk of it damaging itself due to technical issues.
Conclusion
In conclusion, the AMA is intended to enhance the traditional method of mosquito control at construction sites. It is advised to introduce a robot that can monitor and eradicate mosquitoes at construction sites in Hong Kong. If proven successful, this approach can be extended to perform similar tasks at other locations.